2024/03/22
困惑表情を推定しながら勉強を支援する教師ロボットの開発

本研究では,自律的に学習支援を提供できる教師ロボットの開発を進めています.具体的には,学習者が困惑状態の表情を表出したかどうかをロボットが推定することで,自律的な学習支援を実現しています.困惑状態とは,学習者が支援を求めている状態や,提示された問題の解法がわからない場合を指しています. この状態を推定するために,深層学習を活用した困惑推定手法を構築します.
関連論文
学習者の自発的な学習を会話によって促すパートナーロボットの開発

本研究では, 音声認識技術を用いることで, 人とロボットがリアルタイムに会話を行い, 学習者の自発的な学習を促すパートナーロボットの開発を進めます. 自発的な学習とは「自らの意志に従って行われる学習」のことであり, 強制的にやらされる学習より, 学習効果が高いことが報告されています. そこで本研究では, 向上心を引き出し, 学習者が自然と自発的に学習するためのロボットの会話手法を構築していきます. これに加え, ロボットが心理学に基づいた会話口調を用いることが, 学習に与える影響についても調査しています.
関連論文
臨床心理士が知能検査の訓練をするための児童型ロボットの開発
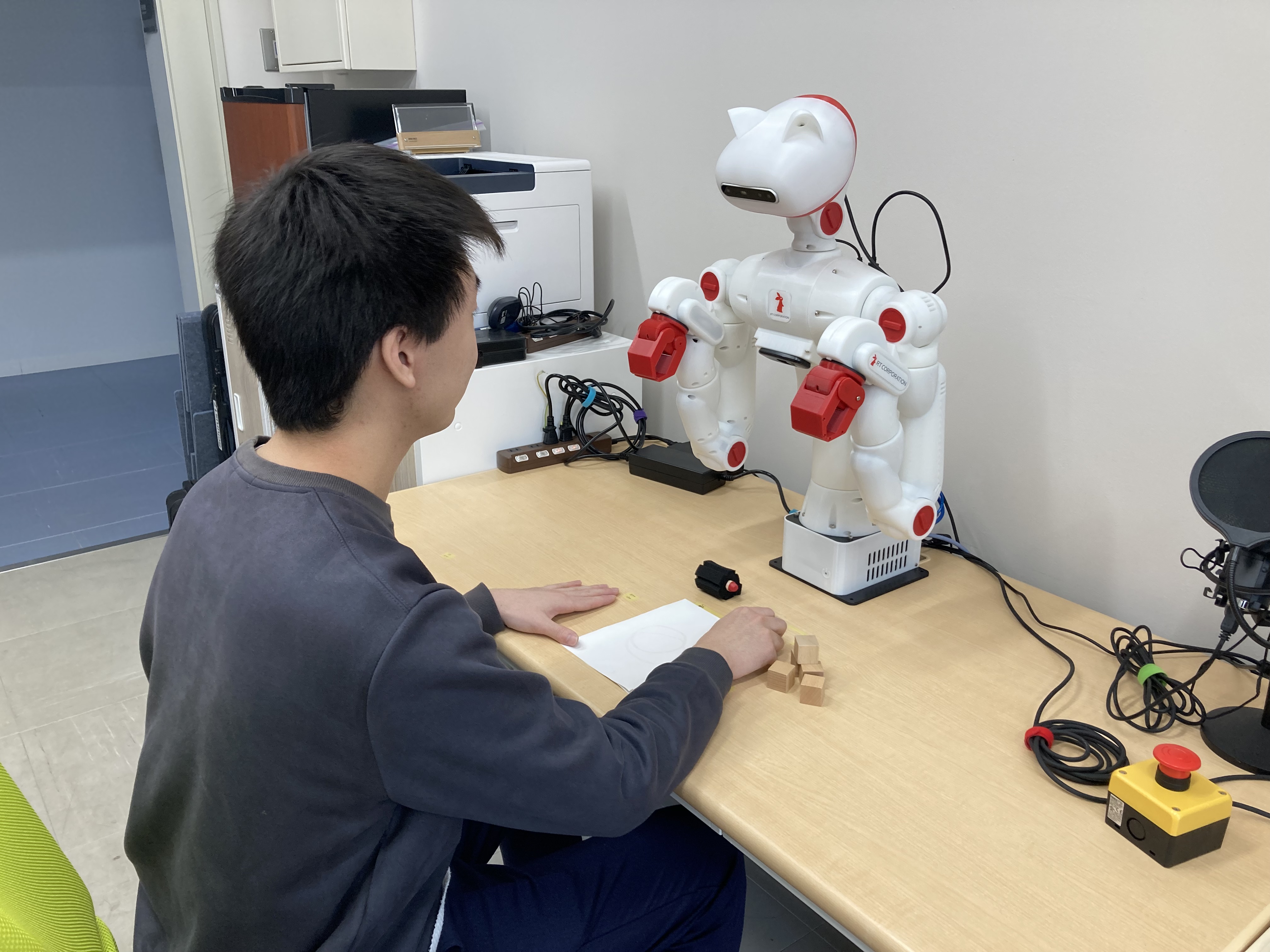
本研究では,臨床心理士の知能検査を訓練する機会が減少していることに注目して,研究を進めています.近年,発達障害児の割合が増加していることから,発達障害児の知能指数や精神年齢などを測定する知能検査を実施できる臨床心理士の需要が増加しています.子どもは長時間の集中を保てないため,臨床心理士は可能な限り効率よく短時間で知能検査を実施する必要があります.効率よく検査を実施するためには訓練が必要になります.しかし,訓練対象者の確保が困難であることから,訓練の機会が減少しています.そこで訓練の対象となるロボットを開発することで訓練の機会を増加させることができると考え,本研究を進めています.
GROWモデルに基づいて正しい運転行動を教示するロボットの開発

ドライバーは基本的に安全運転を行っていますが,運転に慣れてくるほど危険な運転行動をする傾向にあります.高齢者になると認知機能の減少により,危険運転の比率が高まり運転事故につながりやすくなります.危険運転、運転事故の発生件数抑制を目的として,本研究では「どのような状況が危険か」「危険な状況でどのような対処をすればよいか」を教示するロボットを開発しています.ロボットは学習者に危険運転の動画を提示し,GROWモデルに基づいて正しい運転行動を教示します.
関連論文