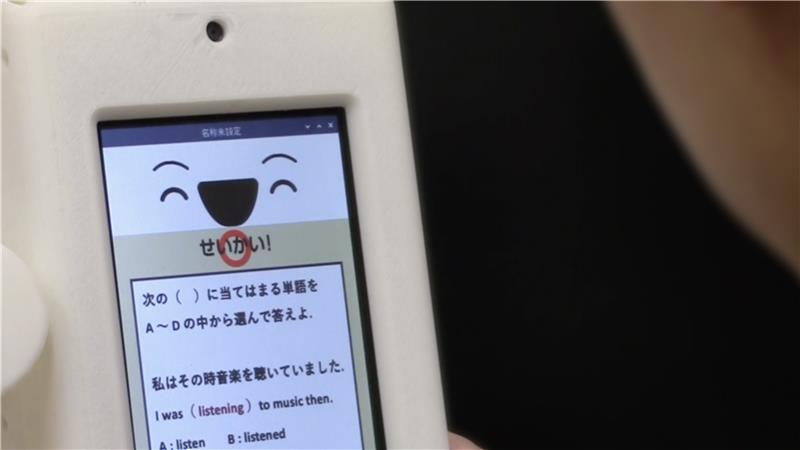
本研究では,学習者の理解状況に応じて自律的に学習支援を行う教師型ロボットの開発を進めています.
学習中には,「分からない」「難しい」と感じる困惑状態が発生することがありますが,その状態を適切に把握して支援することが学習効果の向上につながると考えられています.
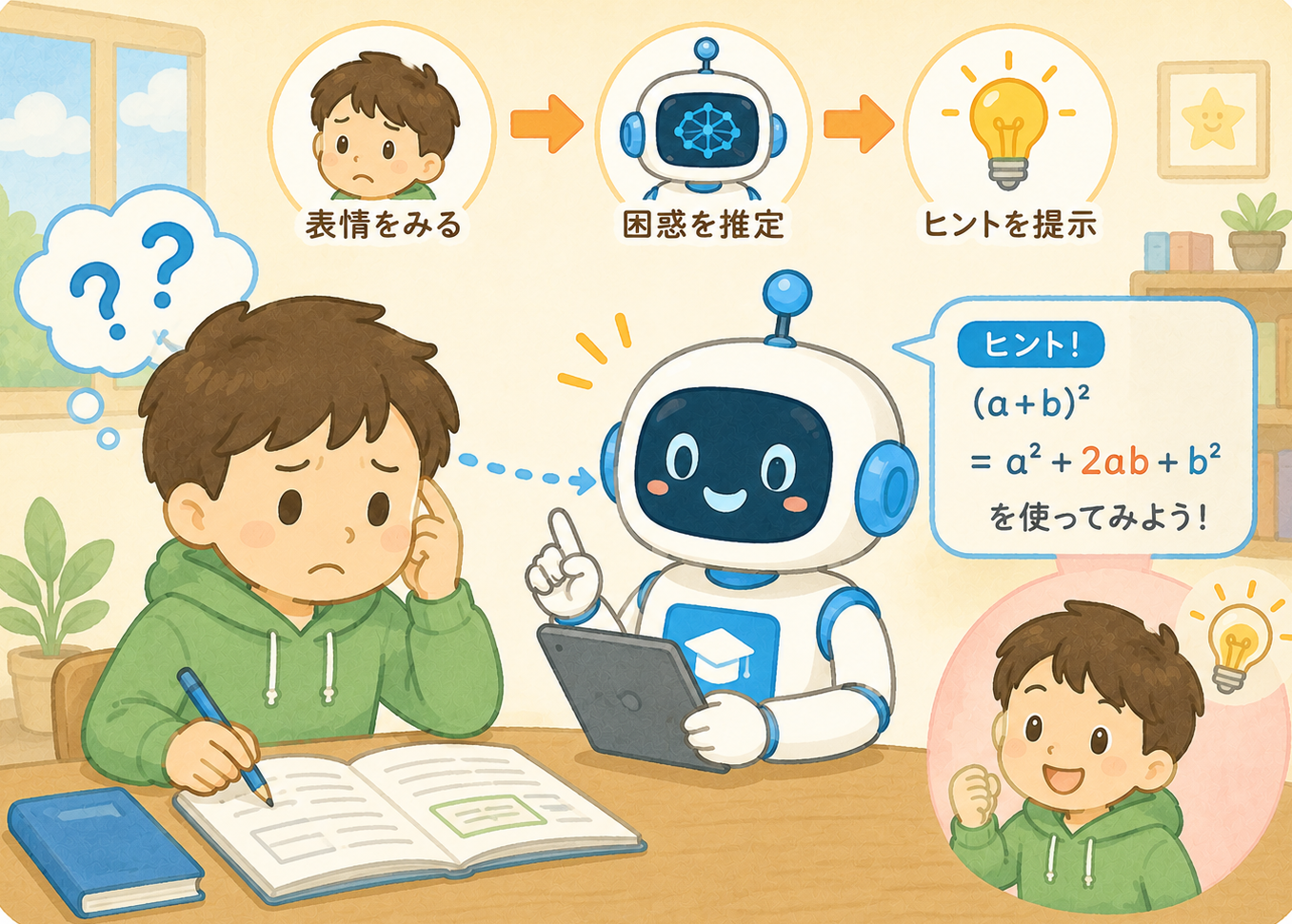
そこで本研究では,学習者の表情や学習状況をロボットが観察し,困惑状態かどうかを推定することで,その状況に応じたヒントや解説を提示する学習支援システムを構築しています.
また,困惑状態を高精度に推定するため,深層学習を活用した表情認識技術や,複数の情報を統合して判断するマルチモーダルAIの研究にも取り組んでいます.将来的には,一人ひとりの理解度に合わせて学習を支援できる知的な教師ロボットの実現を目指しています.
参考:論文1 論文2
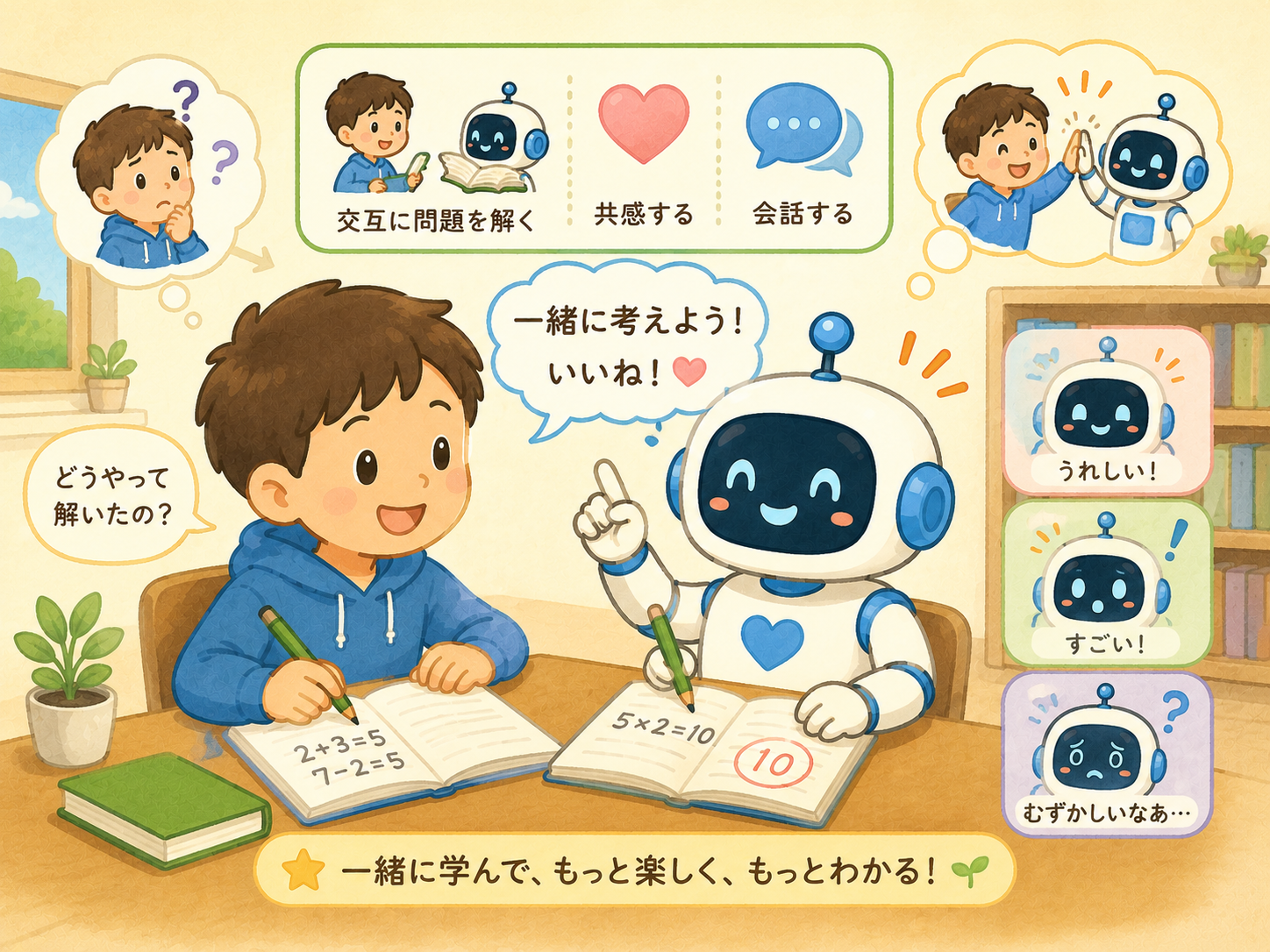
本研究では,学習者と友達のような関係を築きながら,共に学習を進めるパートナー型ロボットの開発を行っています.教師のように教えるのではなく,学習者と同じ目線で問題に取り組み,励まし合いながら学習を進めることで,学習意欲や学習継続意欲の向上を目指しています.
具体的には,学習者と交互に問題を解き合う行動モデルや,喜び・驚き・困惑などの感情を表出しながら学習者に共感する感情モデルを構築しています.また,音声認識技術や対話技術を活用することで,学習者と自然な会話を行えるコミュニケーション手法の研究も進めています.
さらに,学習者がロボットに教えることで理解を深める「Learning by Teaching」の考え方を取り入れ,学習者が自発的に学びたくなる学習環境の実現を目指しています.将来的には,家庭学習や学校教育の現場において,長期間にわたり学習を支援できる知的なパートナー型ロボットの実現を目標としています.
参考:論文1 論文2

本研究では,発達障害児やグレーゾーン児童の増加に伴い,知能検査を実施できる臨床心理士の需要が高まっていることに着目し,知能検査の訓練を支援する児童型ロボットの開発を行っています.
知能検査では,子どもの発話や行動を正確に観察しながら検査を進める必要があります.しかし,実際の訓練では十分な練習機会を確保することが難しく,大学や医療現場において効果的な訓練環境の構築が課題となっています.
そこで本研究では,子どものような発話や行動を再現できる児童型ロボットの行動モデルを構築するとともに,検査手順や対応方法を学習できる訓練支援システムの開発を進めています.
将来的には,臨床心理士が繰り返し知能検査を練習できる環境を実現し,検査技術の向上や発達支援分野における人材育成へ貢献することを目指しています.
参考:論文1

本研究では,高齢化に伴う認知機能の変化によって危険運転や交通事故のリスクが高まることに着目し,高齢者の安全運転を支援する弱虫ロボットの開発を行っています.
ロボットは,「どのような状況が危険なのか」「危険な場面ではどのような運転行動を取るべきか」を学習者と対話しながら伝えます.単に正解を教えるのではなく,高齢者自身に考えてもらうことで,安全運転に対する理解を深めることを目指しています.
具体的には,ロボットが怖がったり,困ったり,泣いたりするなど,高齢者よりも弱い立場を演出しながら対話を行います.また,コーチング手法として知られるGROWモデルを活用し,高齢者が自ら危険運転の原因や改善方法を考えられるよう支援します.
将来的には,高齢者が楽しみながら安全運転について学習できる対話型ロボットの実現を目指し,交通事故の予防や高齢者の運転支援への応用を目標としています.
参考:論文1 論文2

少子高齢化に伴い,多くの企業では人材不足が深刻な課題となっています。そのため,限られた人数で効率よく業務を遂行できるシステムの需要が高まっています.
本研究では,AI技術やレコメンド技術を活用し,企業の業務を自動化・効率化するアプリケーションの開発を行っています.具体的には,サーバ上のデータを自動的に収集・分析し,見積書や受注情報の処理を支援するシステムや,利用者に最適な商品を推薦するレコメンドシステムの研究を進めています.
また,蓄積されたデータを分析することで,業務改善や意思決定を支援する仕組みの構築にも取り組んでいます.さらに,大規模言語モデル(LLM)を活用し,プログラムの不具合を自動的に検出・修正する次世代型アプリケーションの研究も進めています.
将来的には,AIが人の業務を支援し,より少ない負担で効率的に働くことができる知的な業務支援システムの実現を目指しています.
近年,商業施設や公共施設をはじめとして,人とコミュニケーションを行うロボットがさまざまな場面で活用されています.教育分野においても,学習者一人ひとりに合わせた支援を行う教育支援ロボットへの期待が高まっています.
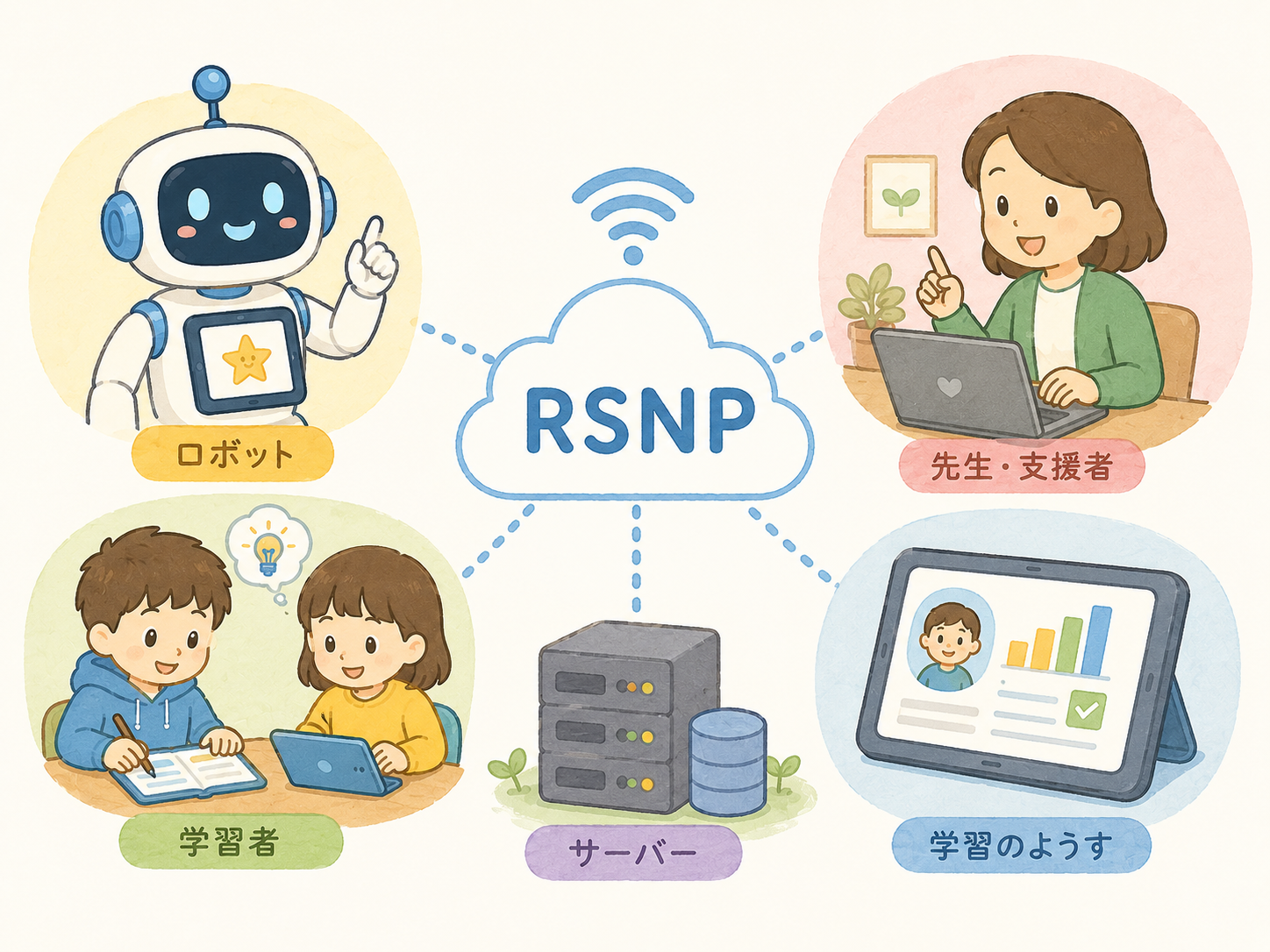
本研究では,教育支援ロボット,学習システム,サーバを連携させるネットワークモデルの開発を行っています.ロボットが学習者の学習状況や操作履歴を収集し,サーバへ送信することで,学習データの蓄積や分析を実現しています.
また,ロボット専用の通信プロトコルであるRSNP(Robot Service Network Protocol)を活用し,複数の機器が安定して連携できる通信環境を構築しています.さらに,Javaを用いた学習システムを開発し,ロボットとの連携による新しい学習支援環境の実現を目指しています.
将来的には,多数のロボットや学習システムがインターネットを介して連携し,より高度で柔軟な教育支援を実現できるネットワーク基盤の構築を目標としています.
参考:論文1