






世界一スマートな連係プレーをするロボットの技術開発
[ロボット同士の連係技術の構築]


めざすは、ロボカップ世界大会 優勝!!
研究課題
1
研究課題
1
ロボット同士の連係技術の構築
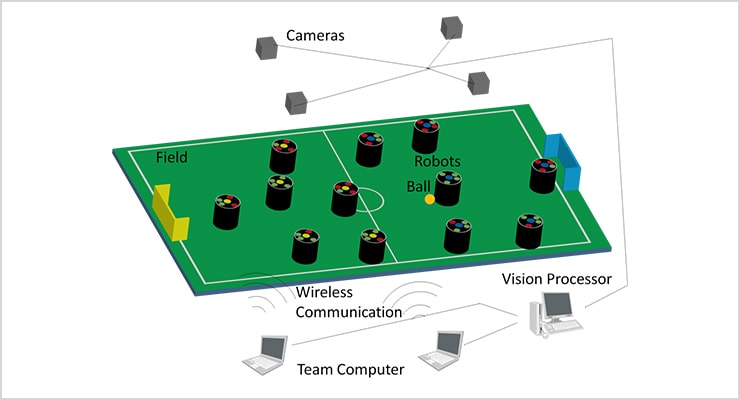
2台、3台のロボットが連係してパス&パス、そしてシュート!
ロボットサッカーで「動きながらダイナミックな動きをする」ためには、より高度な連係技術が要求されます。現状は、止まった状態からのプレーが主なので、次のステップとして、お互いが動きながらパス&シュート!ができるよう技術を磨いています。ドリブルしながらキープする、トラップする、また相手の動きを読んで正確にパスを出す。私たちが普段何気なくしている動作をロボットで再現するには、画像処理やデータ解析、制御、通信など、様々な技術の連係が必要です。ロボットサッカーの祭典、「ロボカップ」で世界一となることを目標に練習ならぬ技術を高め、いずれは人の世界最高峰のサッカーチームと対戦し、勝つことを夢みてチャレンジを続けています。

研究課題
2
研究課題
2
人工知能の発展に寄与
サッカーの試合中に、「相手の動きや戦略を読む」には?
人間は相手の視線や身体の向きを見て瞬時に判断しますが、ロボットの場合、相手のプレーを学習して次の動きを予測することになります。プレー中もオンラインで学習し、ログとして蓄積し、その結果を生かす、つまりそこには大量収集したデータをいかに早く分析するかというデータ解析と、それに基づいて動かす技術が重要となります。ダイナミックに情報を読み、攻めの一手を打つ。現在は人間にしかできないことを、ロボットで実現していく。そのチャレンジに、この研究の醍醐味があります。
line
DOCUMENT
詳細資料
line
ROBO CUP TEAM
愛知県立大学ロボカップチーム紹介


標準プラットフォームリーグチーム
Camellia Dragons
ロボカップ JAPAN OPEN
標準プラットフォームリーグ
2014 優勝
2015 優勝